03. Answer: Graph SLAM
Constraints
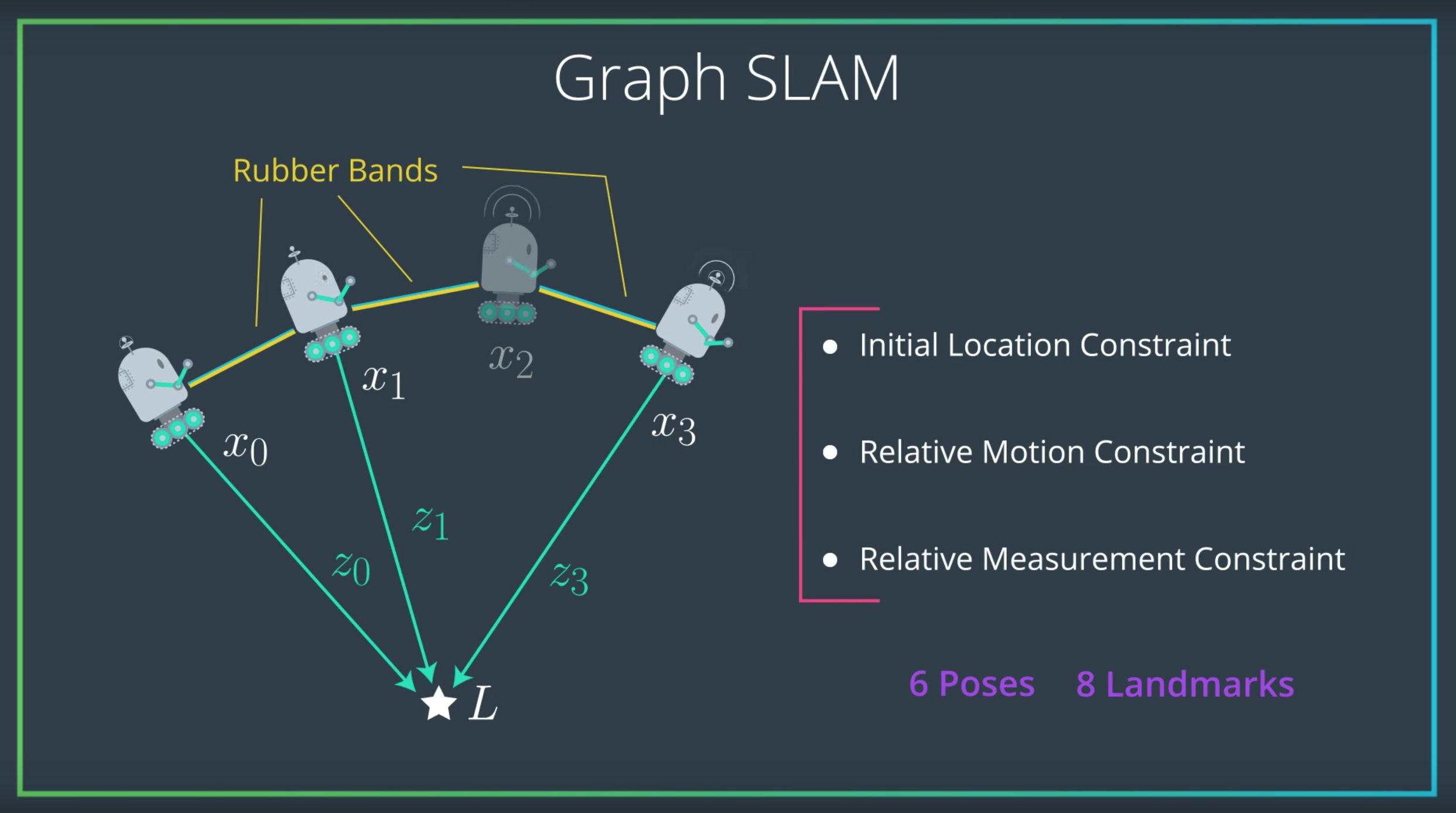
For our 6 poses, we have:
- 1 initial location constraint
- 5 additional, relative motion constraints, and finally,
- 8 relative measurement constraints for the 8 landmark locations
Adding all of these up gives us a total of 14 constraints.
Now, consider the image above, with 4 poses (including the initial location x0) and one landmark. We can use this same math and say that there are 5 total constraints for the given image, but in practice there are usually many more measurements and motions!
Implementing Constraints
You also may have noticed that not all of these constraints will provide us with meaningful information, such as in our example: we do not have a measurement between the pose x3 and the landmark location. Next, let's see how we can represent these constraints in a matrix and their relationships with values in that matrix and a constraint vector.